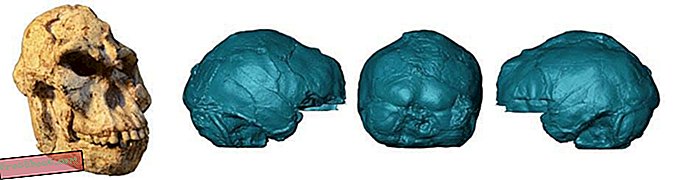
Le nouveau robot traverse une surface inégale à la manière d'un lézard à queue de zèbre. Image reproduite avec l'aimable autorisation de Chen Li, Tingnan Zhang et Daniel Goldman
Concevoir un robot qui peut facilement se déplacer sur des terrains meubles - par exemple, un mobile censé traverser la surface de Mars - pose un défi technique unique: les roues s'enfoncent généralement dans ce que les ingénieurs appellent un «sol fluide» (mélanges de sable, de sol, de boue et d'herbe) ).
Compte tenu des nombreuses innovations biologiquement inspirées de la robotique, une équipe de chercheurs de Georgia Tech a eu une idée: fonder une conception sur des créatures du désert telles que les lézards à queue de zèbre capables de se faufiler sur une surface lâche et sablonneuse sans ralentir. Leurs efforts leur ont permis de créer ce petit appareil à six pattes, présenté dans un article publié aujourd'hui dans Science, qui peut parcourir une surface granuleuse d’une manière qui rappelle étrangement un reptile.
L'équipe de recherche, dirigée par Chen Li, a conçu le dispositif après avoir étudié la locomotion de diverses créatures et simulé mathématiquement les performances de différents types de jambes (de nombre, de forme et de longueur variables) dans plusieurs environnements distincts. Ils espèrent que leurs recherches stimuleront le développement d'un domaine qu'ils ont qualifié de «terradynamique» - tout comme l'aérodynamisme concerne les performances des véhicules à ailes dans les airs, leur domaine étudiera le mouvement des véhicules à jambes sur des surfaces granulaires.
Pour concevoir leur robot, ils ont utilisé ces simulations pour déterminer les longueurs exactes des jambes, les vitesses de déplacement et les niveaux de force qui propulseraient les dispositifs sur une surface meuble sans les immerger trop profondément. Ils ont ensuite imprimé divers types de jambes avec une imprimante 3D et construit des robots pour les tester en laboratoire.
L'une de leurs découvertes les plus intéressantes est que les mêmes types de principes de conception s'appliquent à la locomotion sur diverses surfaces granulaires, notamment les graines de pavot, les perles de verre et le sable naturel. Leurs simulations et leurs expériences sur le terrain ont révélé que les jambes en forme de C fonctionnaient généralement mieux, mais que tous les types de membres en forme d’arc fonctionnaient relativement bien car ils répartissaient le poids de l’appareil sur de longues surfaces (bien qu'étroites) des jambes lorsque les jambes arrivaient. en contact avec le sol au cours d'une foulée.

Les chercheurs ont découvert que les membres en forme de C sont plus efficaces pour se déplacer rapidement sur des surfaces granulaires, à la fois chez les lézards et les robots. Les représentations pointillées, solides et pointillées en C et D représentent les positions précoce, moyenne et tardive de la jambe au cours d'une foulée. Les flèches indiquent les directions de mouvement pour des régions spécifiques des jambes. Image via Science / Li et. Al.
Les applications de ce type de recherche sont vastes: ce chercheur, dit les chercheurs, pourrait devenir un outil de recherche et de sauvetage ou de dépistage très utile, tandis que les principes dérivés du domaine de la terradynamique pourraient être utiles pour la conception de sondes explorant d'autres planètes dans le futur. Ils pourraient également aider les biologistes à mieux comprendre comment les formes de vie sur Terre ont évolué pour se déplacer à la surface de notre planète.