Il est assez courant pour les humains - en particulier ceux qui travaillent dans le secteur manufacturier - de faire un nœud, de dénuder le câble, d'insérer une épingle dans un trou ou d'utiliser un outil à main tel qu'une perceuse. Elles peuvent sembler être des tâches simples, mais sont en réalité très complexes et impliquent des mouvements extrêmement fins des doigts et des mains.
Contenu connexe
- Comment les robots ont quitté le laboratoire et commencé à aider les humains
Bien que les robots soient de plus en plus impliqués dans le travail en usine et dans un large éventail d'autres types d'emplois, y compris dans le secteur des services et des soins de santé, leur dextérité est loin d'être aussi impressionnante. Depuis que les gens les ont amenés pour la première fois dans des usines automobiles il y a plus de 50 ans, nous avons construit des robots capables de souder, de peindre et d'assembler des pièces. Les meilleures mains robotiques d’aujourd’hui peuvent ramasser des objets familiers et les déplacer ailleurs, par exemple prendre des produits dans des bacs d’entrepôt et les mettre dans des boîtes.
Mais les robots ne peuvent pas orienter correctement un outil à main - par exemple, alignez un tournevis à tête cruciforme avec les rainures d'une vis ou visez un marteau contre un clou. Et ils ne peuvent certainement pas utiliser les deux mains ensemble de manière détaillée, comme remplacer les piles d'une télécommande.
Les mains humaines sont excellentes pour ces tâches et bien plus encore. Pour pouvoir rivaliser avec ce dont nos mains sont facilement capables, les mains de robot ont besoin de plus d'agilité, de fiabilité et de force - et doivent être en mesure de détecter avec plus de précision et de bouger encore plus finement qu'elles ne le font maintenant, pour comprendre ce qu'elles ' re holding et comment mieux le saisir. Pour que les robots puissent travailler aux côtés des humains, nous devrons trouver un moyen de créer des robots capables de nous donner un coup de main alors que nos deux ne suffisent pas.
Mon groupe de recherche de la Northeastern University travaille justement sur ce point, en particulier pour les robots humanoïdes tels que Valkyrie de la NASA, qui a trois doigts et un pouce sur chaque main. Chaque chiffre a des articulations, et chaque main a un poignet qui peut pivoter facilement. Nous travaillons à la création de mouvements - combinaisons de mouvements de bras, poignets, doigts et pouces qui accomplissent collectivement une tâche, comme déplacer une clé dans un cercle pour serrer un boulon ou tirer un chariot d'un endroit à un autre.
 Chacun de ces robots industriels dispose de plusieurs outils spécialisés. Est-ce que beaucoup de leurs tâches pourraient être effectuées par des mains robotiques? (Steve Jurvetson / flickr, CC BY)
Chacun de ces robots industriels dispose de plusieurs outils spécialisés. Est-ce que beaucoup de leurs tâches pourraient être effectuées par des mains robotiques? (Steve Jurvetson / flickr, CC BY) L'importance des mains
Plutôt que de faire de chaque robot une machine personnalisée sur mesure pour une tâche très spécifique, nous devons concevoir des robots à usages multiples, voire des machines capables, appelées «polyvalentes», utiles pour presque toutes les tâches. Une des clés du succès de ces types de robots sera d’excellentes mains.
Notre travail se concentre sur la conception d'une nouvelle classe de mains de robot adaptables, capables de mouvements précis et précis et d'une saisie autonome. Lorsque les robots sont capables de clouer des clous, de changer de pile et de faire d'autres mouvements similaires - élémentaire pour l'homme mais très complexe pour un robot - nous nous dirigeons bien vers une dextérité humaine à la robotique.
Atteindre cet objectif implique également d'inventer de nouveaux modèles intégrant des éléments durs et mous - la façon dont l'os humain donne de la force à la prise en main, la peau étalant la pression permettant à un verre de vin de ne pas éclater.
Développement et test plus rapides
Les améliorations technologiques modernes facilitent le processus de développement. Avec l'impression 3D, nous pouvons réaliser des prototypes très rapidement. Nous pouvons même fabriquer des composants jetables à faible coût pour essayer différents agencements de mécanismes, tels que des pinces à deux ou trois doigts pour les tâches de transfert simples ou des mains de robot anthropomorphes pour des opérations plus délicates.
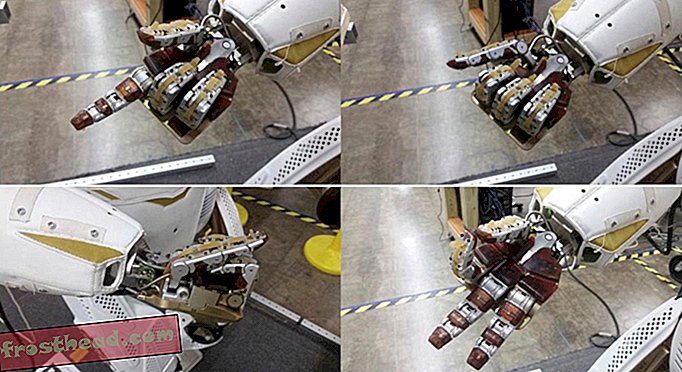 Différents types de mains sur un robot Valkyrie de la NASA. (Northeastern University, CC BY-ND)
Différents types de mains sur un robot Valkyrie de la NASA. (Northeastern University, CC BY-ND) À mesure que les caméras et les capteurs électroniques deviennent de plus en plus petits, nous pouvons les intégrer de nouvelles façons. Par exemple, si nous plaçons des capteurs de pression et des caméras dans une main robotique, ils peuvent envoyer des commentaires au contrôleur de robot (qu'il soit humain ou automatisé) lorsqu'une prise est sécurisée ou lorsque quelque chose commence à glisser. Un jour, ils seront peut-être en mesure de détecter la direction dans laquelle l'objet glissant se déplace afin que le robot puisse l'attraper.
Ces capacités sont déjà une seconde nature pour les humains grâce à la vision et à la proprioception (la capacité de détecter les positions relatives des parties du corps sans y regarder ni y penser). Une fois que nous sommes capables de les atteindre avec des robots, ils seront capables de faire des choses comme détecter si une prise est trop forte et si elle serre un objet trop fort.
Planifier des mouvements coordonnés
Une autre étape importante sera la mise au point de méthodes permettant aux robots de déterminer les mouvements qu’ils doivent effectuer en temps réel, notamment de détecter ce qui se passe entre leurs mains à chaque instant. Si une main de robot peut détecter des changements dans les objets qu’elle manipule, ou manipuler des objets tout en les tenant, ils peuvent vous aider dans les tâches manuelles courantes telles que l’assemblage de nœuds et le dénudage de fils.
Travailler à deux mains est encore plus loin dans l’avenir, mais cela donnerait un coup de pouce significatif, en particulier pour le secteur manufacturier. Un robot capable de faire fonctionner une perceuse à deux mains ou de passer d'une pièce à l'autre des pièces de la machine constituerait de grandes améliorations, permettant aux usines d'automatiser encore plus d'étapes dans leurs processus.
 Est-ce le robot du futur? (NASA)
Est-ce le robot du futur? (NASA) Nous, les humains, n'avons pas encore développé ces systèmes. L'obtention d'une dextérité de robot autonome, semblable à celle d'un humain, occupera les chercheurs, les technologues et les innovateurs en robotique dans un avenir proche. Cela ne ralentira pas la révolution robotique en cours dans la fabrication, car les processus actuels offrent encore beaucoup de place à l'automatisation pour améliorer la sécurité, la vitesse et la qualité. Mais si nous améliorons encore les robots, ils pourront nous donner un coup de main.
Cet article a été publié à l'origine sur The Conversation.
Taskin Padir, professeur agrégé de génie électrique et informatique, Northeastern University